The cable tension switch sensor for the Open Tentacle robot project, is designed to detect when the cable is slack. Binary in the sense of is the cable slack; yes / no.
Knowing if a tendon cable is slack will allow the control software to tell the motors to move and tighten up that cable.

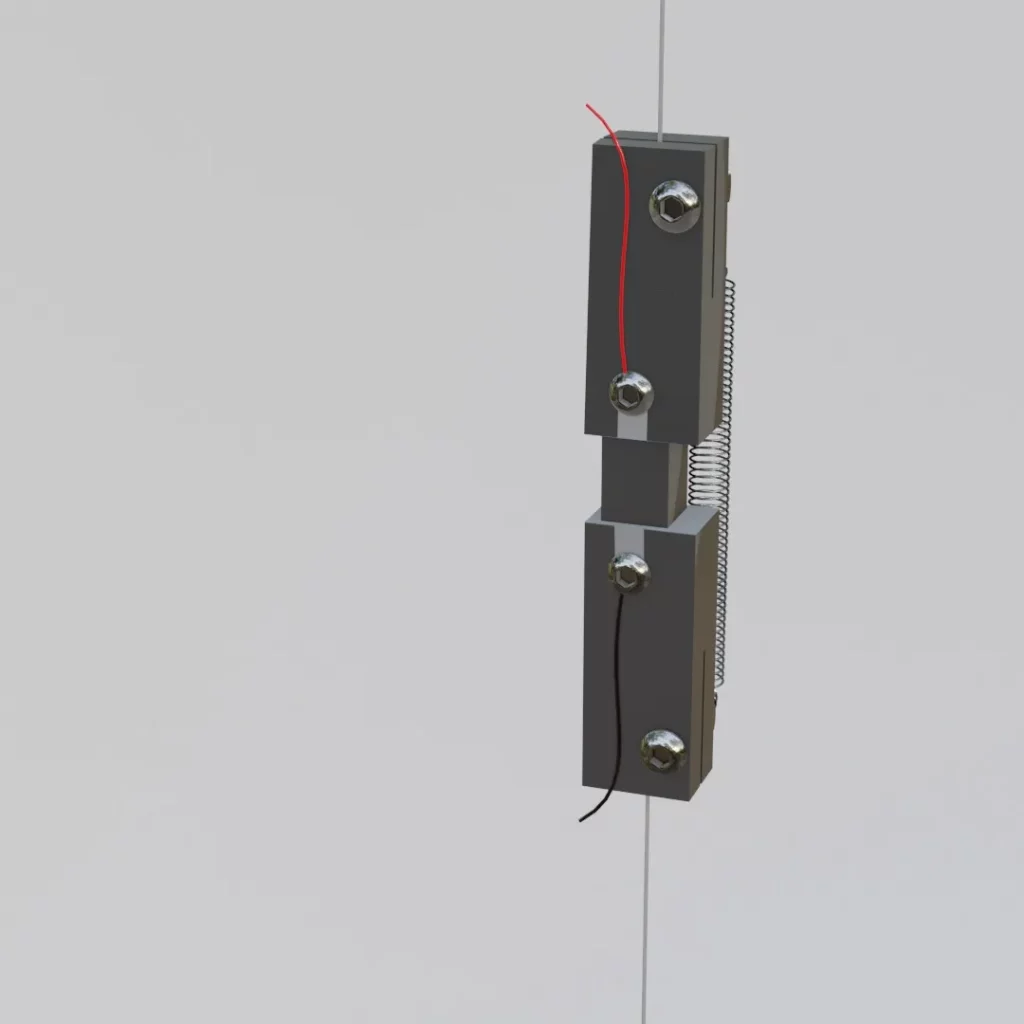
To the right is the original design drawing.
The sensor switch consists of two parts. One slides inside the other and they are held together by a spring.
There is metal on the touching surfaces that is electrically connected to a circuit.
A cable is threaded through the hollow center, and when the two pieces are spread apart a bit, then the ends are tightened down so that when the pieces are brought together the cable bunches up / is slack.
The idea is that when the cable is pulled tight, the two pieces spread apart and the circuit to the Arduino analog input is broken.
I used aluminum foil as the conductive metal contact. I ended up redoing this as the foil has to be a continuous piece as to be conductive all the way out to the wire connection points.
I guess unless you scraped off the insulating adhesive on the bottom for at least some area.

This is what I ended up putting in place.
I connected the wires to the tightening bolts.
Electrical tape was put on to lesson the chances that there would be a short with a nearby cable sensor.
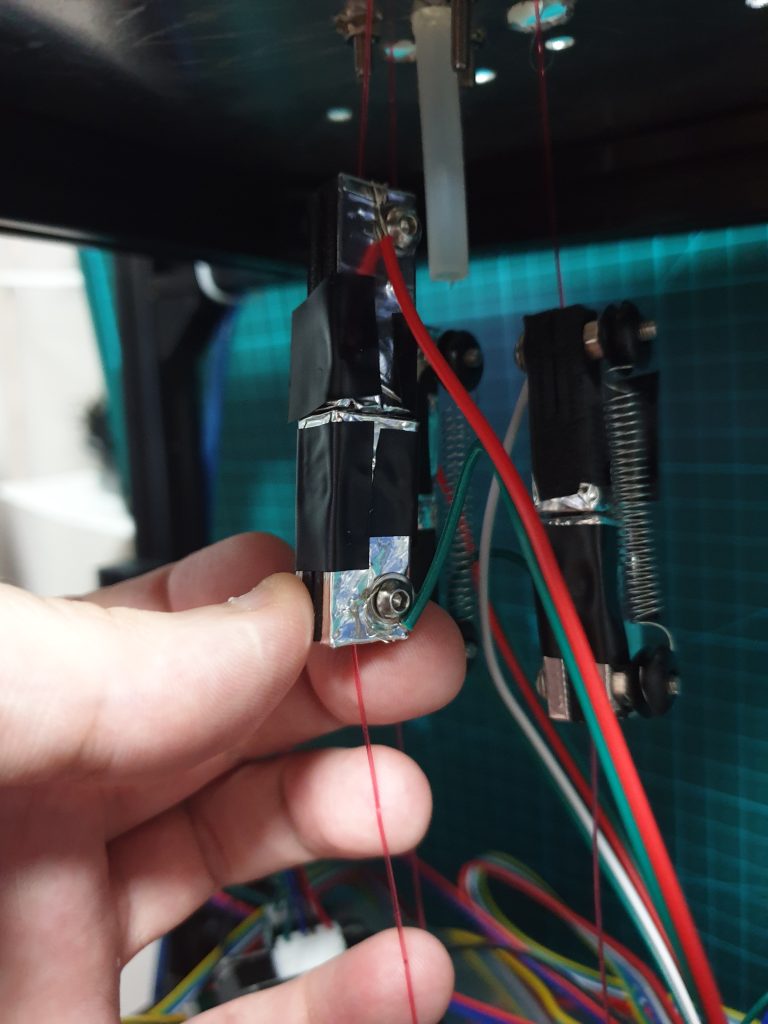
I used rubber grommets to insulate the springs from the conductive bolts.
I’ll need stronger springs or rubber bands to that there is enough force to pull the sensor parts together, that a tight cable overcomes.