
Do Anything from Anywhere : a project to develop affordable remote AI assisted robotics systems to enable people to do anything from anywhere.
The idea behind the project is to enable the separation of work from location.
The end of workforce shortages and enabling nearly universal employment through Micro-AI task assistance.
Where AI doesn’t do everything but simplifies tasks, and the harder problem solving tasks are left to a human.
And to help make pervasive adoption possible, a key component of the project is also to develop much more affordable robotic systems.


Project Development and Thoughts
- This is a survey of company vision / mission statements that sell robotic systems. ABB– “ABB’s purpose is to enable a more …
 This is a loose collection of thoughts of a long term vision of what drives my projects. Currently I have a flexible robotic arm project in the …
This is a loose collection of thoughts of a long term vision of what drives my projects. Currently I have a flexible robotic arm project in the … Humans have amazing abilities. Highly dexterous hands, joints that can rotate and flex to many angles, highly adept sense of balance, and the ability …
Humans have amazing abilities. Highly dexterous hands, joints that can rotate and flex to many angles, highly adept sense of balance, and the ability … The cable tension switch sensor for the Open Tentacle robot project, is designed to detect when the cable is slack. Binary in the sense of is the …
The cable tension switch sensor for the Open Tentacle robot project, is designed to detect when the cable is slack. Binary in the sense of is the … The idea of Do Anything from Anywhere is the idea to enable any physical work to be done from anywhere remotely. What would be the advantages of this …
The idea of Do Anything from Anywhere is the idea to enable any physical work to be done from anywhere remotely. What would be the advantages of this … The goal of this motion study on the continuum tentacle robot arm that I am developing, was to measure the relationship between tendon/cable movement …
The goal of this motion study on the continuum tentacle robot arm that I am developing, was to measure the relationship between tendon/cable movement …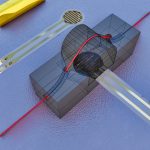 Was thinking about how to implement pressure sensors on the end of the prototype robot continuum arm that is in progress. I want to measure the …
Was thinking about how to implement pressure sensors on the end of the prototype robot continuum arm that is in progress. I want to measure the …