Was thinking about how to implement pressure sensors on the end of the prototype robot continuum arm that is in progress.
I want to measure the tension of the tendons, and placing a sensor on the end seemed to be a logical solution, but a tricky thing to do.
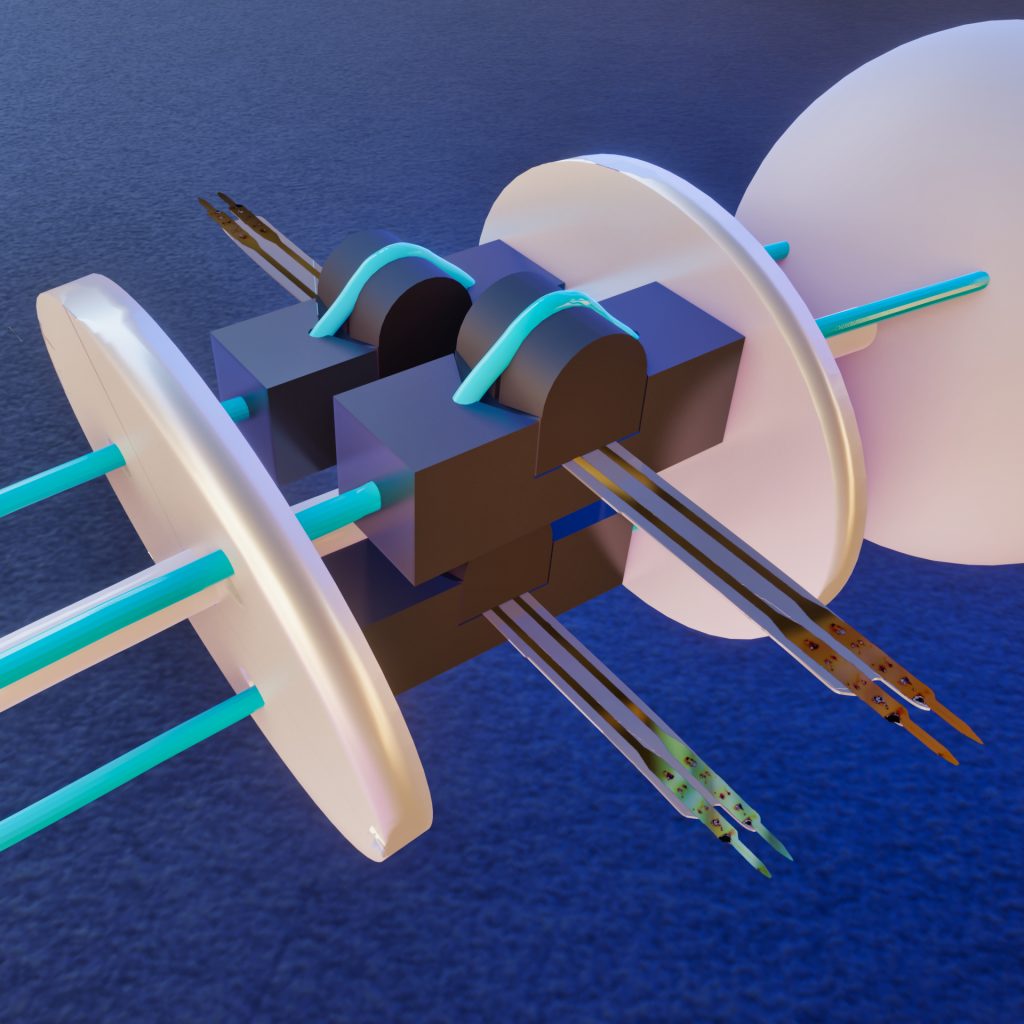
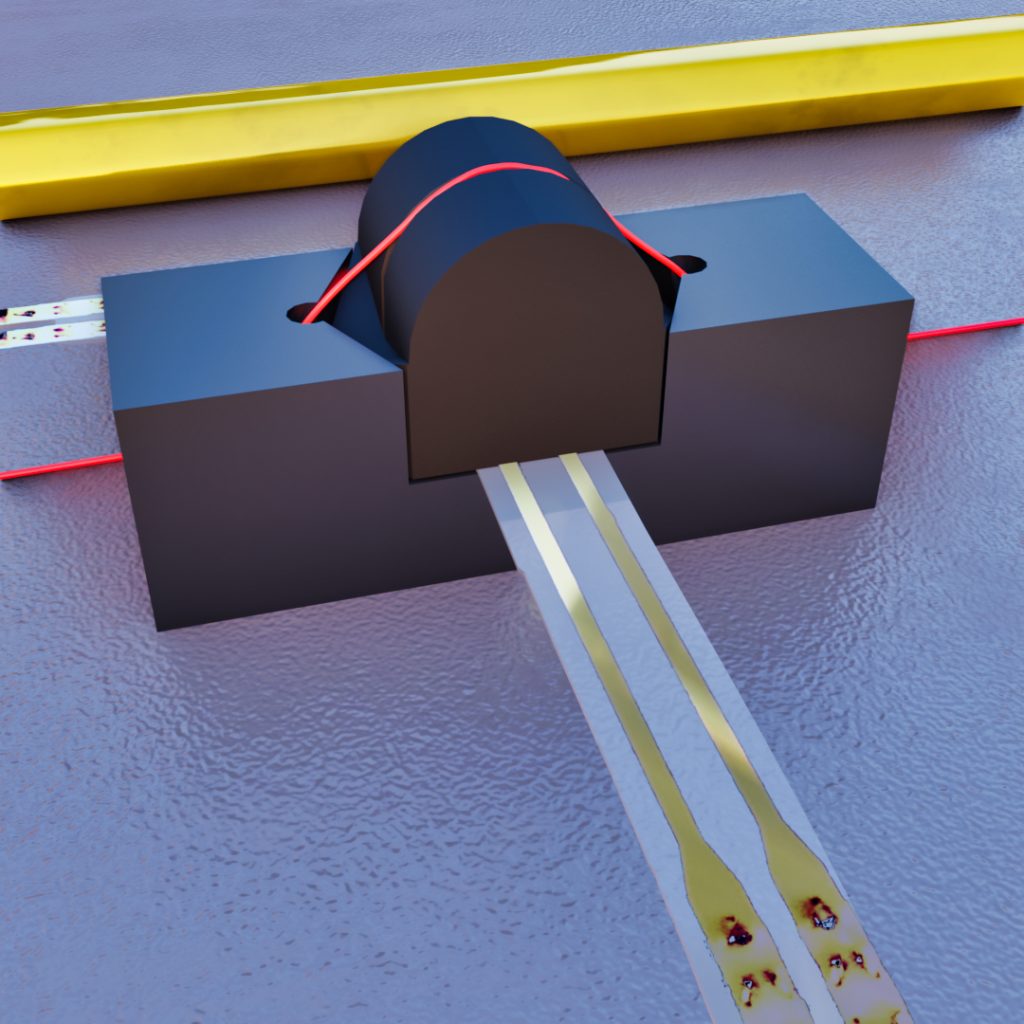
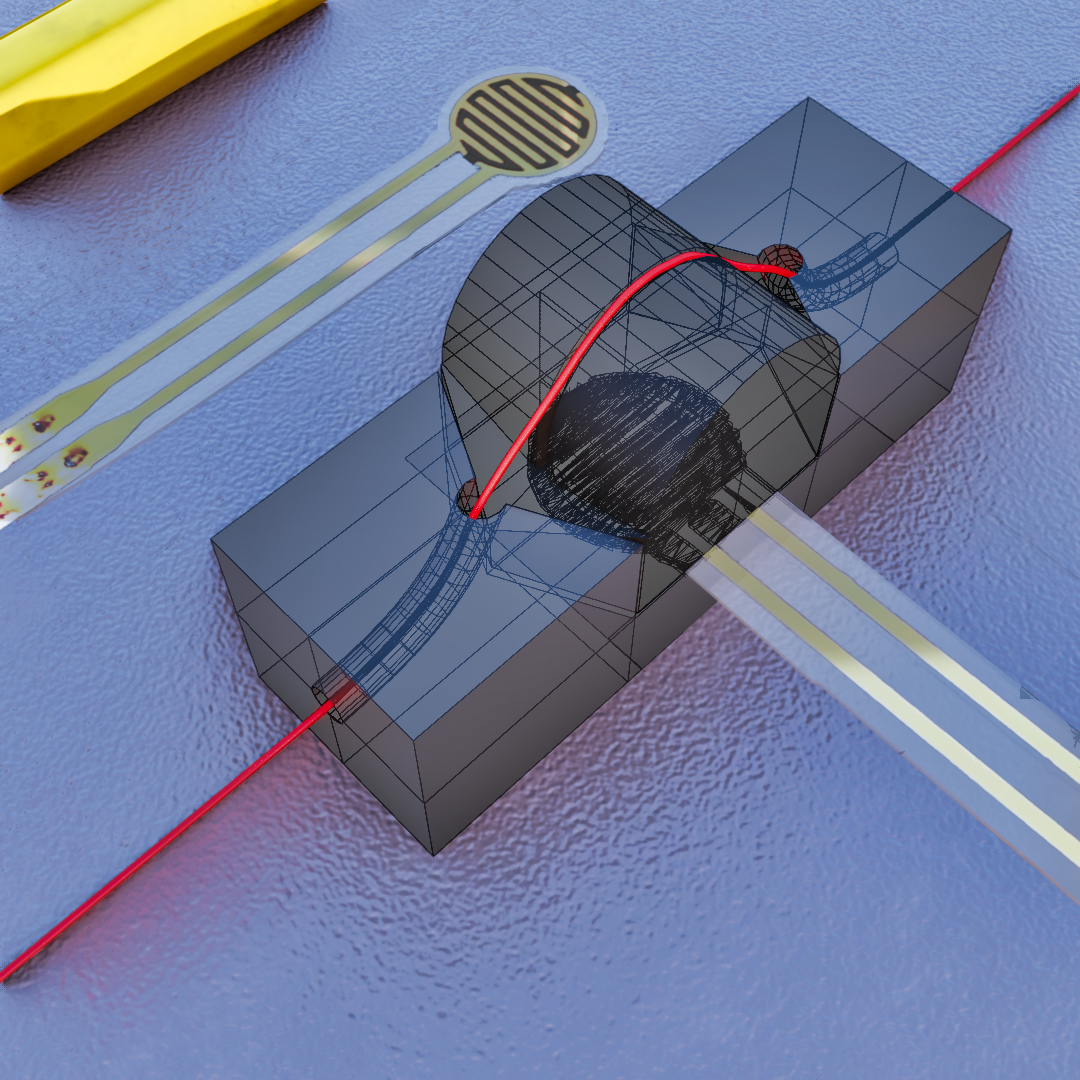
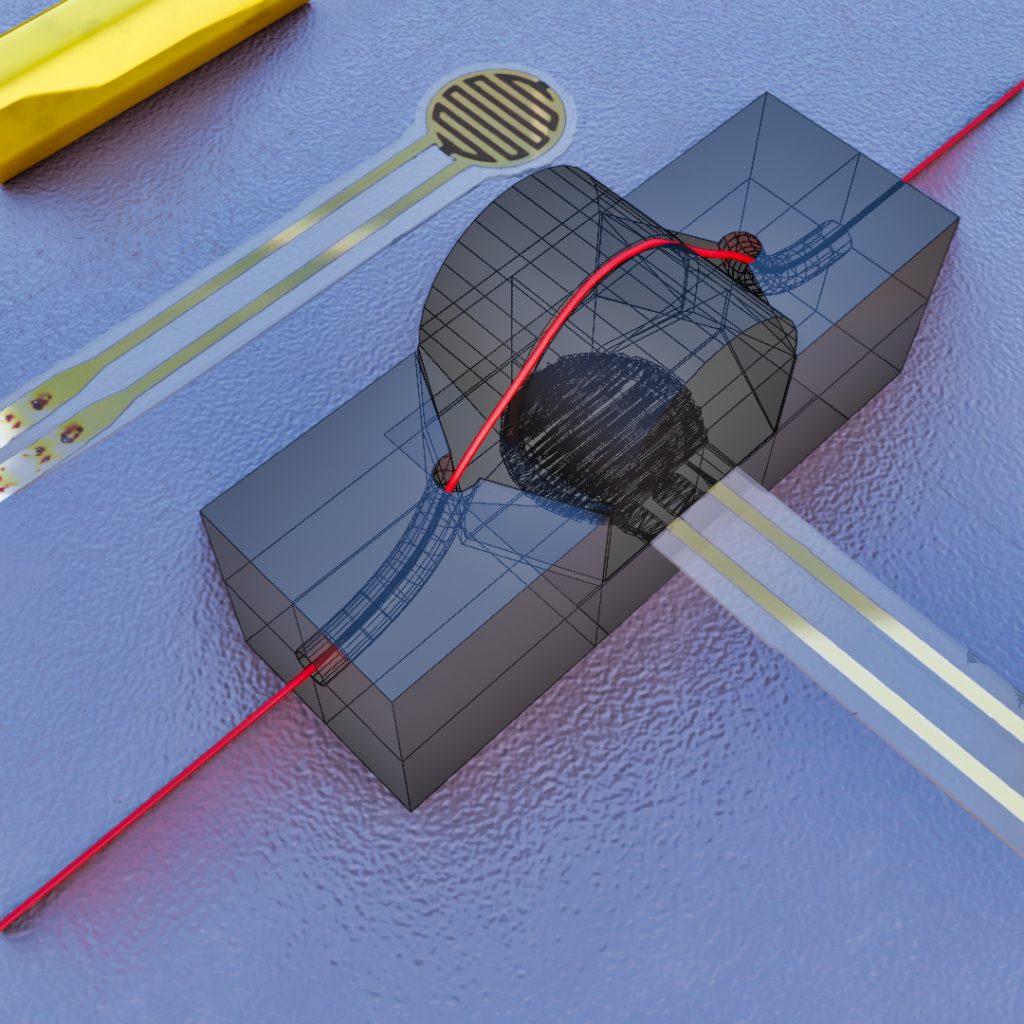
I did a search on how cable tension is measured, and I put together an inline module that should fit the bill nicely 🙂 There may be something like this out there, but at the time of design it wasn’t a copy of anything but just using the idea of inline measurement, and this should hopefully be a cool useful solution.
Tendon tension measurement should be pretty useful for the control system software.