The goal of this motion study on the continuum tentacle robot arm that I am developing, was to measure the relationship between tendon/cable movement and the movement of the being affected by the tendon tension.
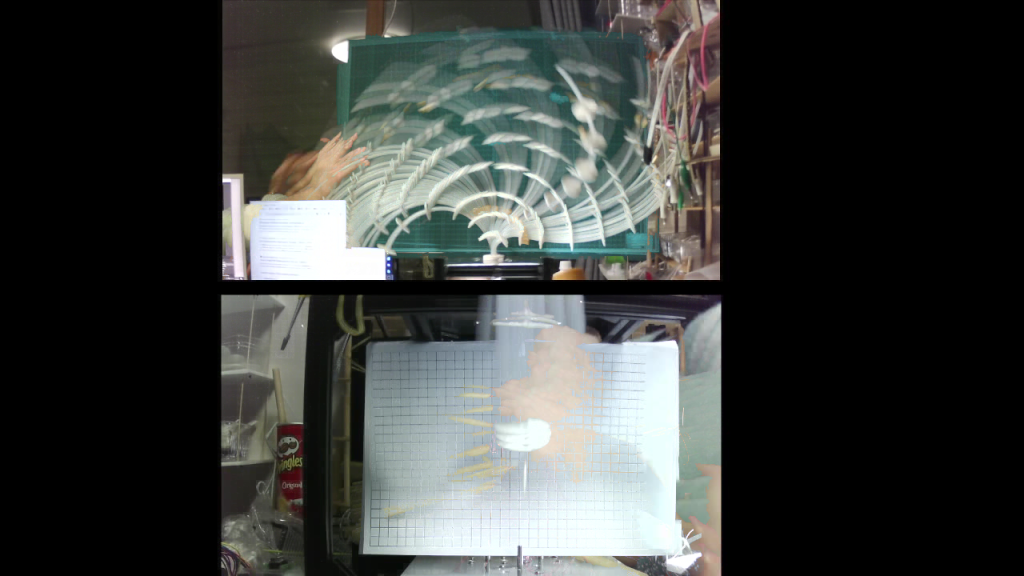
This photo shows the arm system before the motors were moved to the top of the plate, and gives an idea what was being tested.
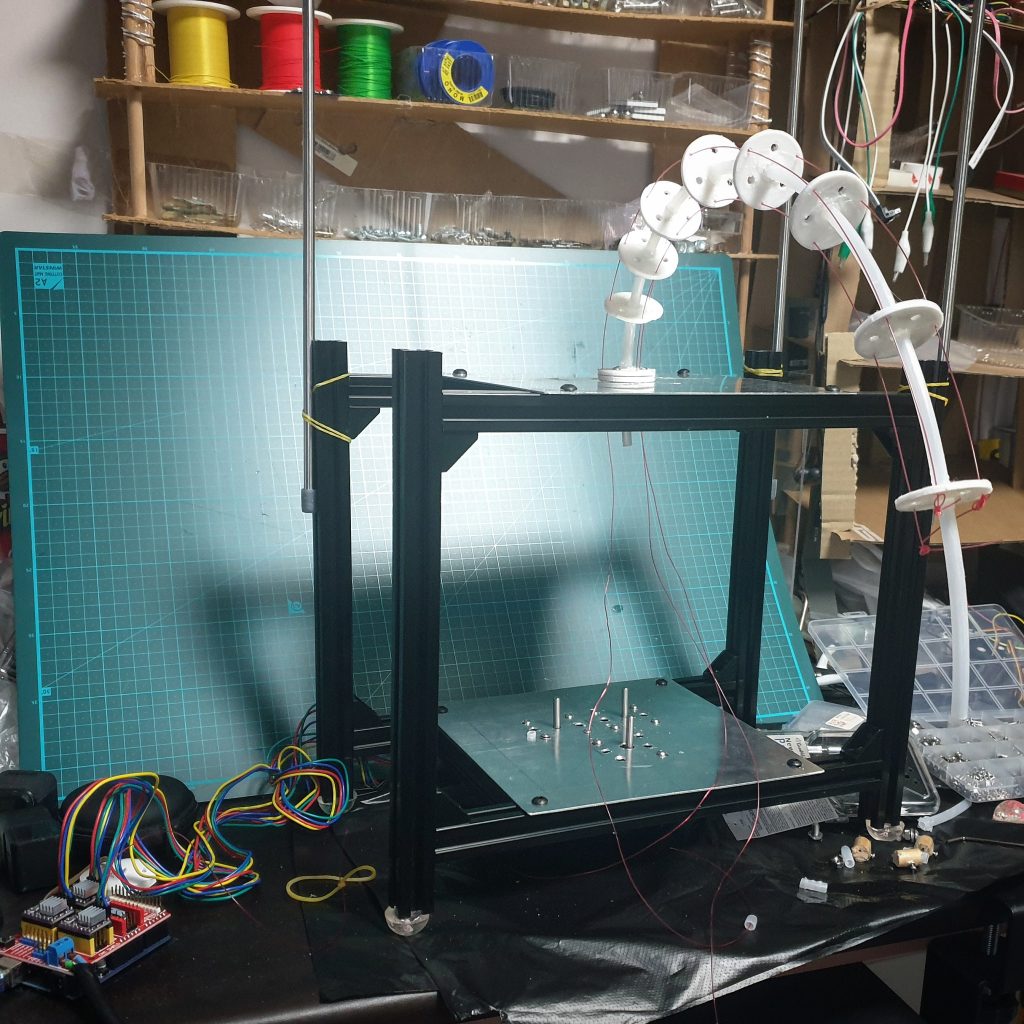
This was a first initial run and the next motion analysis will be done differently, but this was a good learning experience overall.
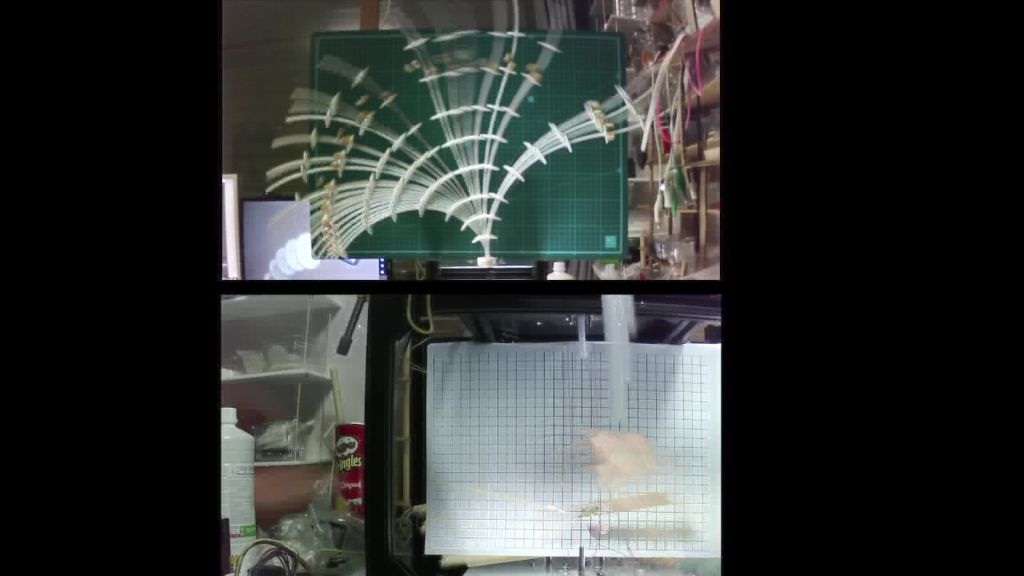
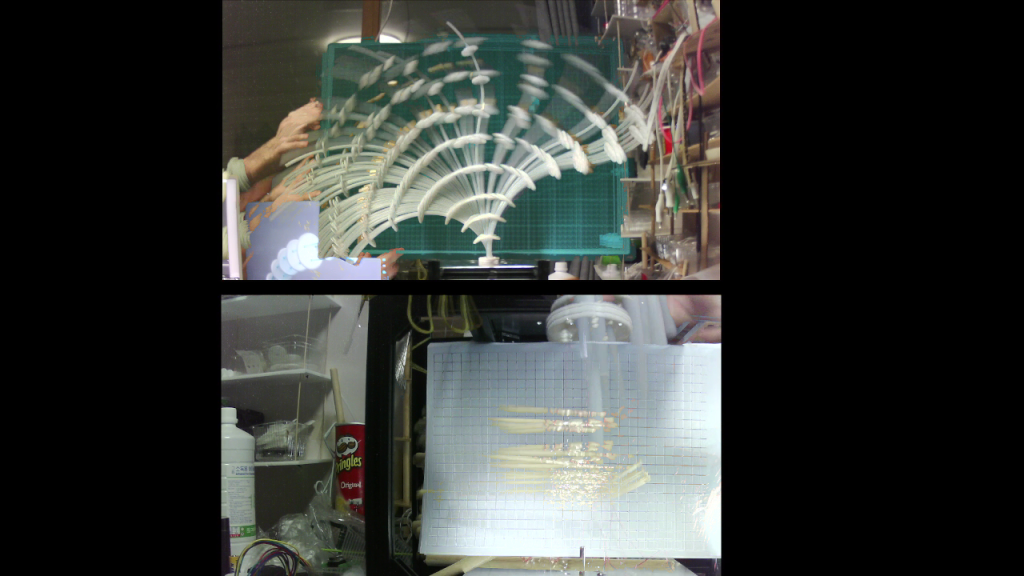
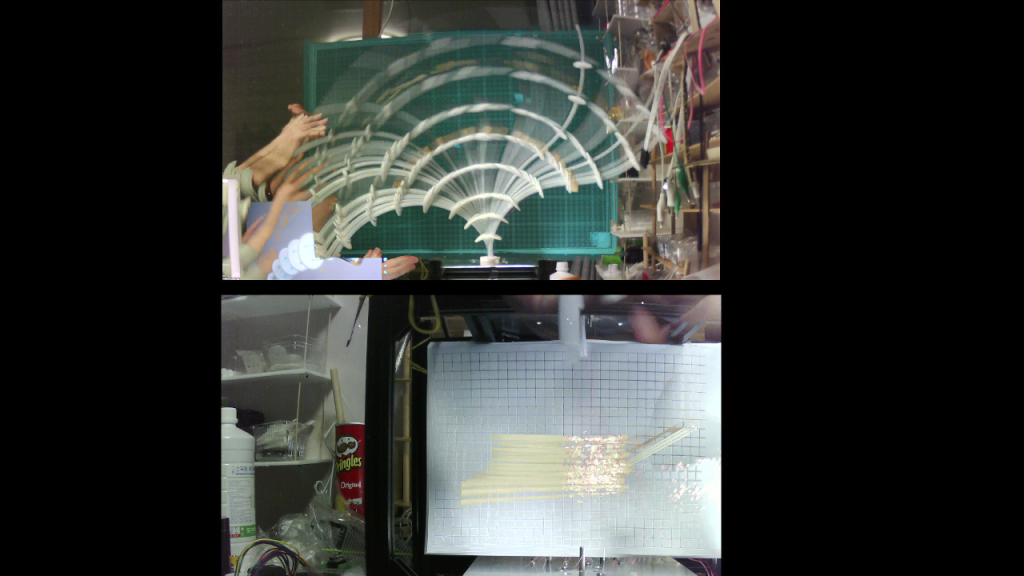
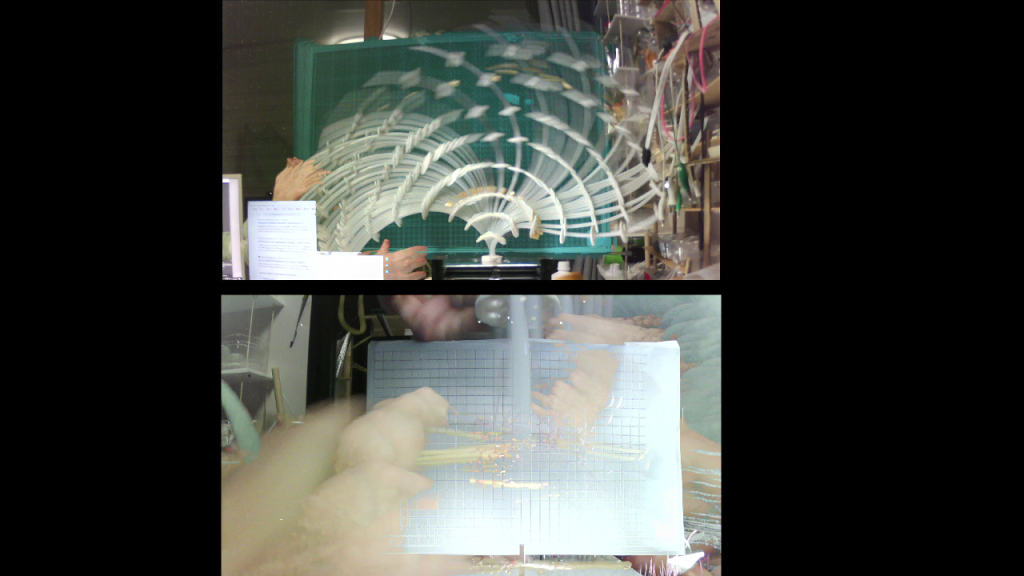
I did a motion study of the continuum tentacle arm by setting up a couple web cameras on tripods from 2 different angles. One was pointing at the bottom where I manually pulled a couple tendons, and the second was pointing at the arm to capture the movement.
Then using a some Python in a Jupiter notebook, I used some libraries I found, and merged frames into a single image.
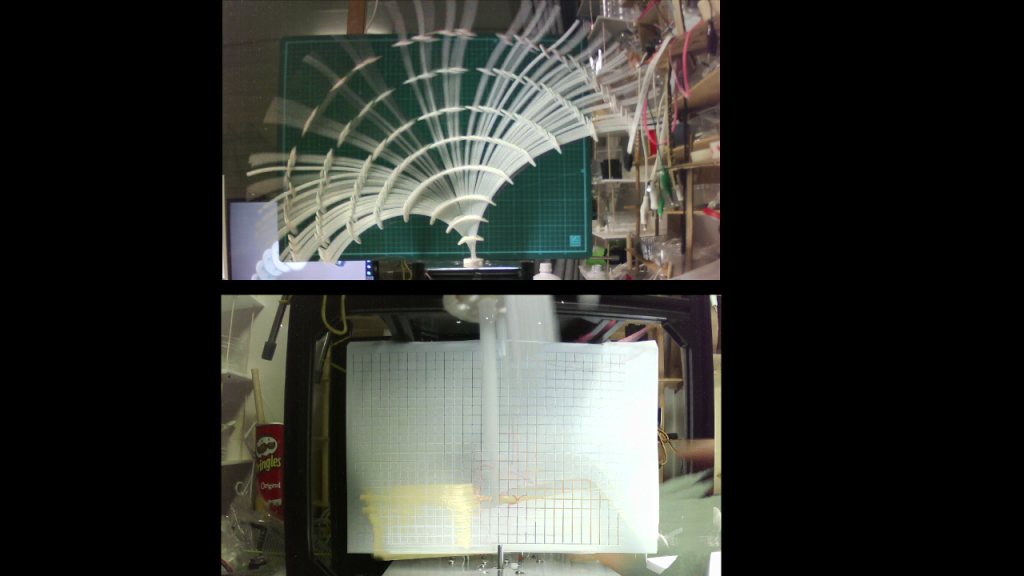
I did this for multiple vertebrae disks along the spine, to see if there was any difference in motion depending on the termination point of the tendon cables.
Here’s a gif of those images overlayed with red spheres added in Blender to show the termination points :
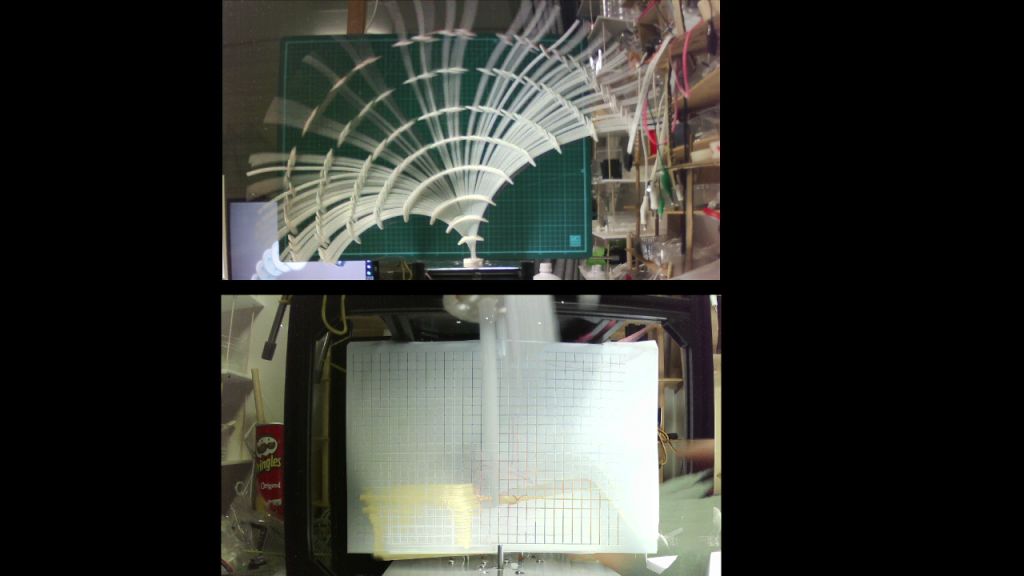

<- Blender has turned out to be great for this sort of thing – After trying to do the same thing in a proprietary video editor, I now prefer Blender for this sort of thing.
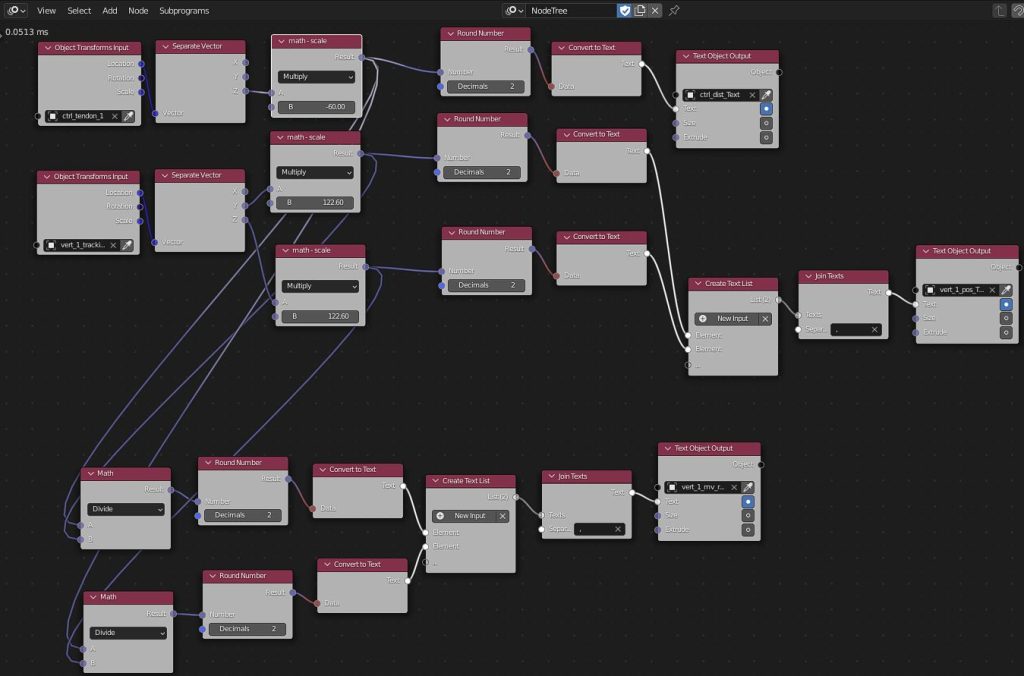
I used the Python Blender scripting, with animation nodes, to extract location data from a hand keyed sphere following the first vertebrae as the tendons were pulled.
Automatic keying an attached colored tracker would be a better route to go next time as opposed to hand keying.
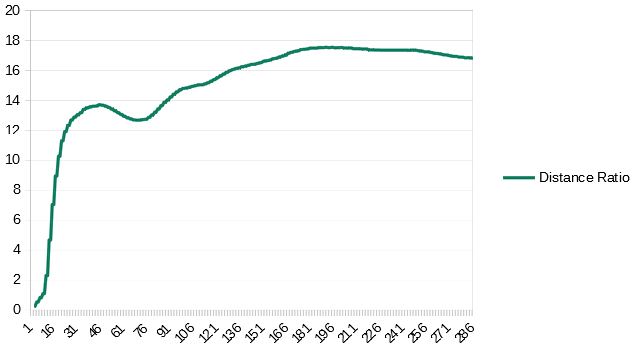
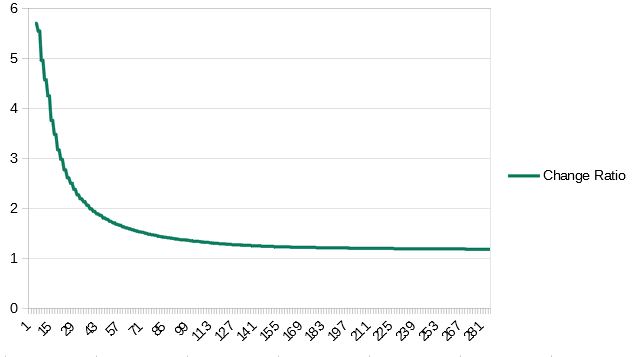
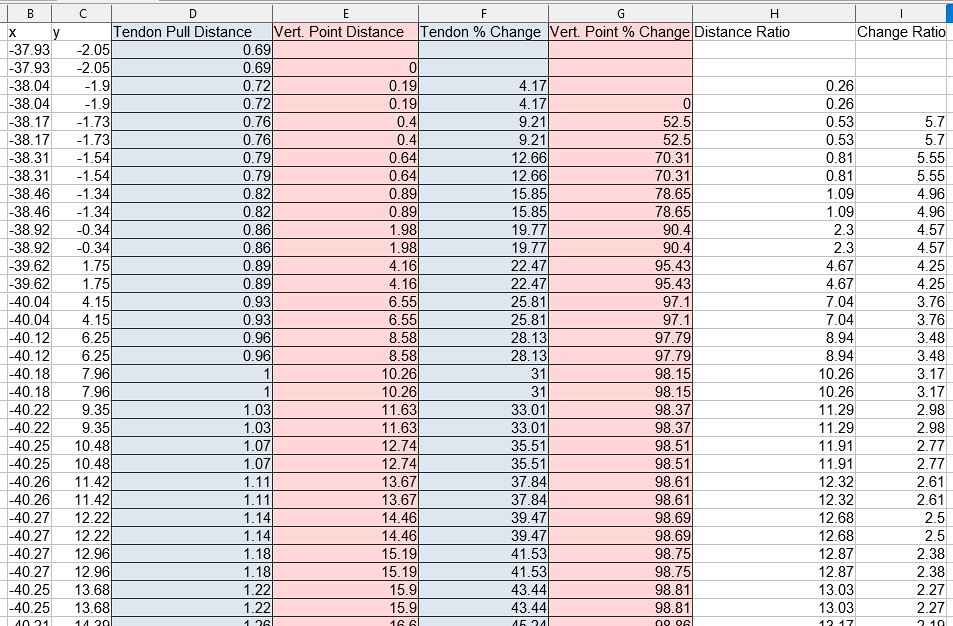
Data was dumped to a CSV file, where it can then be processed/saved into a spreadsheet. I ended up revisiting the data processing part, and for what it is, it’s in better shape.
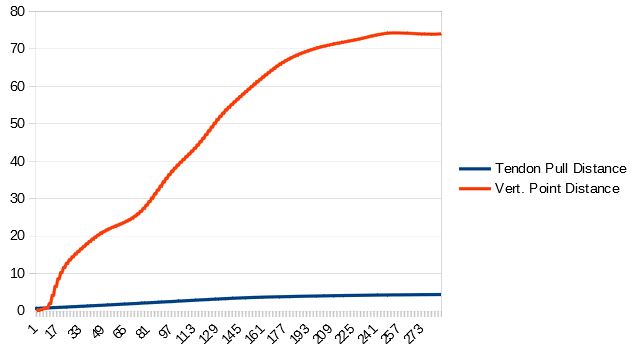
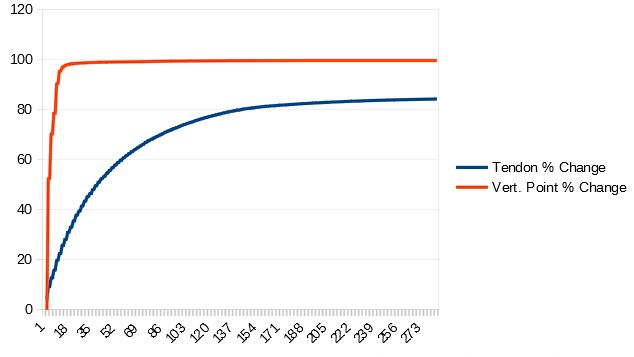
Basically the data shows a significant change in arm movement when the tendon initially starts to move.
The data is messy as the tendons were hand pulled and the point hand keyed, but it was a good learning experience for more that one skill.
Below are some details about how things were done in Blender:
# Blender python script for displaying data from Animation Nodes
import bpy
import csv
def data_handler(scene):
frame_text = "Frame " + str(scene.frame_current)
# get data
vert_1_pos = scene.objects['vert_1_pos_Text'].data.body
vert_1_pos_influance = scene.objects['vert_1_mv_ratio_Text'].data.body
tendon_pull_distance = scene.objects['ctrl_dist_Text'].data.body
position_data = str(vert_1_pos) + "," + str(tendon_pull_distance)
position_data.encode('utf8')
position_data = position_data.replace("\n","")
scene.objects['output_text'].data.body = str(frame_text)
# write to file
csv_data_file = ("C:\\Users\\Jason\\Documents\\head_robotics\\open-tentacle\\0.1.1\\data\\open_tendon_videos\\1st_movment_study\\visual_arm_movement.csv")
file = open(csv_data_file, 'a')
file.write(position_data+'\n')
file.close()
bpy.app.handlers.frame_change_pre.append(data_handler)